

型号:FHR-04
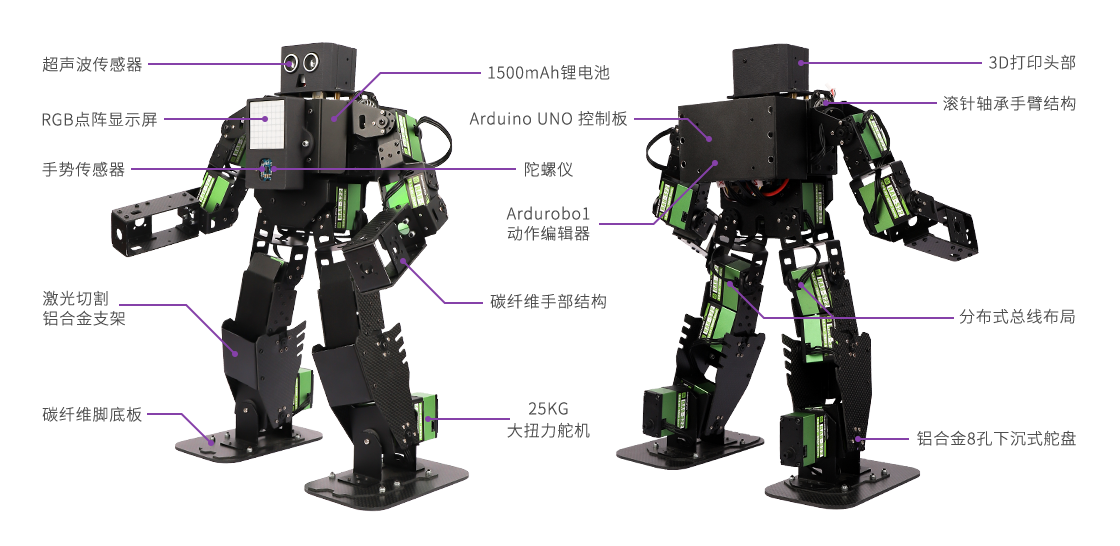
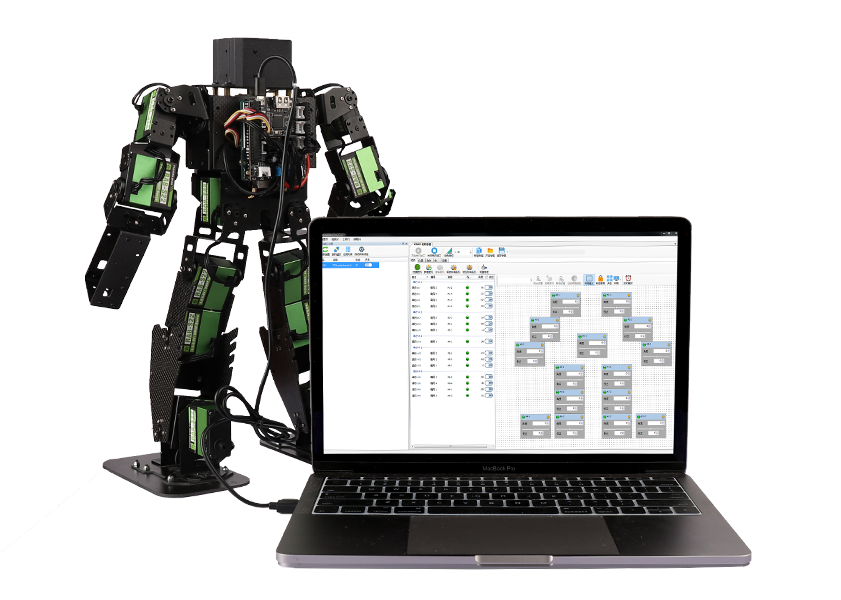
手势识别机器人是一款16自由度的双足人形机器人。它诠释了先用DBSP舵机平台进行动作设计,后在Arduino 编程平台进行二次开发的完美结合,可实现手势识别、超声波避障、跌倒自动站起等功能,并大大降低了开发难度。
机器人机身采用高强度激光切铝合+炭纤维板组合而成,搭载16颗扭力高达25KG的分布式串行总线舵机,机身布线简洁,舵机ID自动分配,不仅能够满足机器人爱好者的研究需求,同时也是适合各年龄段的STEAM教育。
规格参数
| 机身 | 激光切割铝合金 | |
| 头部 | 3D打印 | |
| 手臂 | 激光切割铝合金 | |
| 关节 | 全培林 | |
| 舵机 | 25kg分布式串行总线舵机RA8-S22 | |
| 舵盘 | 8孔铝合金下沉式舵盘 | |
| 控制板 | Ardurobo1+Arduino UNO开发板 | |
| 传感器 | 超声波传感器,手势识别传感器,陀螺仪,RGB点阵显示屏 | |
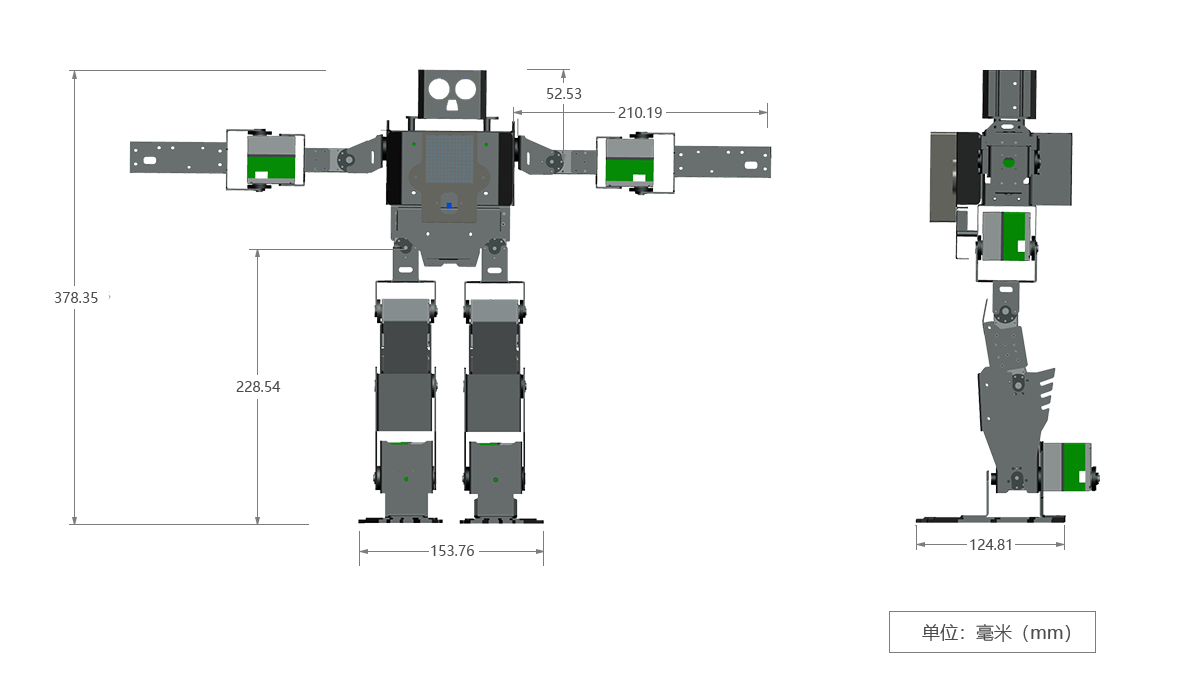
| 尺寸(L×W×H) | 574×124×387 mm | |
| 重量 | 1.85kg |
结构特性

动作编辑器
- 图形化动作编辑器
- 位置回读+全局舵机扫描
- 三步完成动作设计
- 在线姿态调整
- 支持动作组管理
- 蓝牙虚拟手柄
- 动作文件跨平台分享
- iOS/Android
机身尺寸
发布者:Fashion Star,转转请注明出处:https://fashionrobo.com/steamrobot/22884/
