



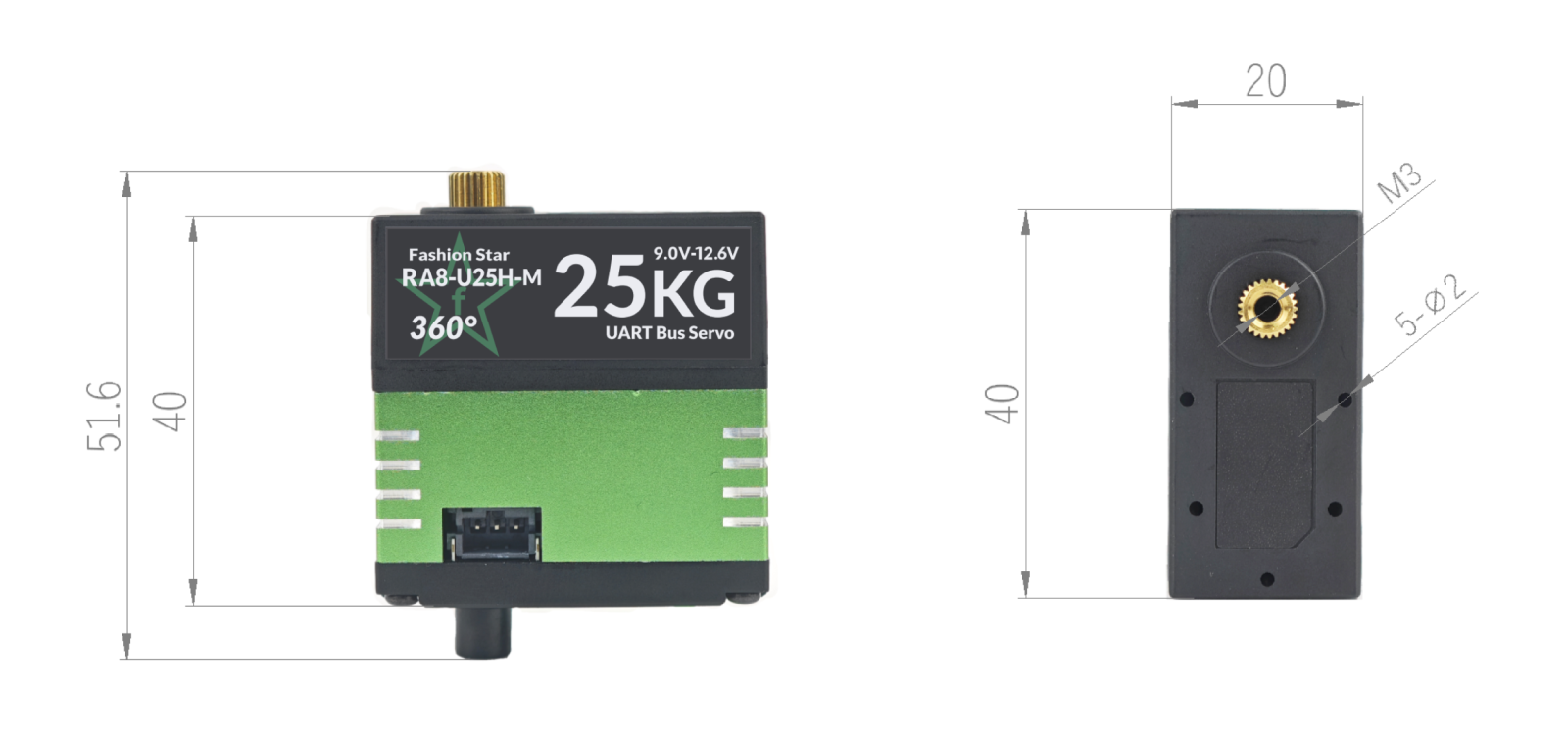
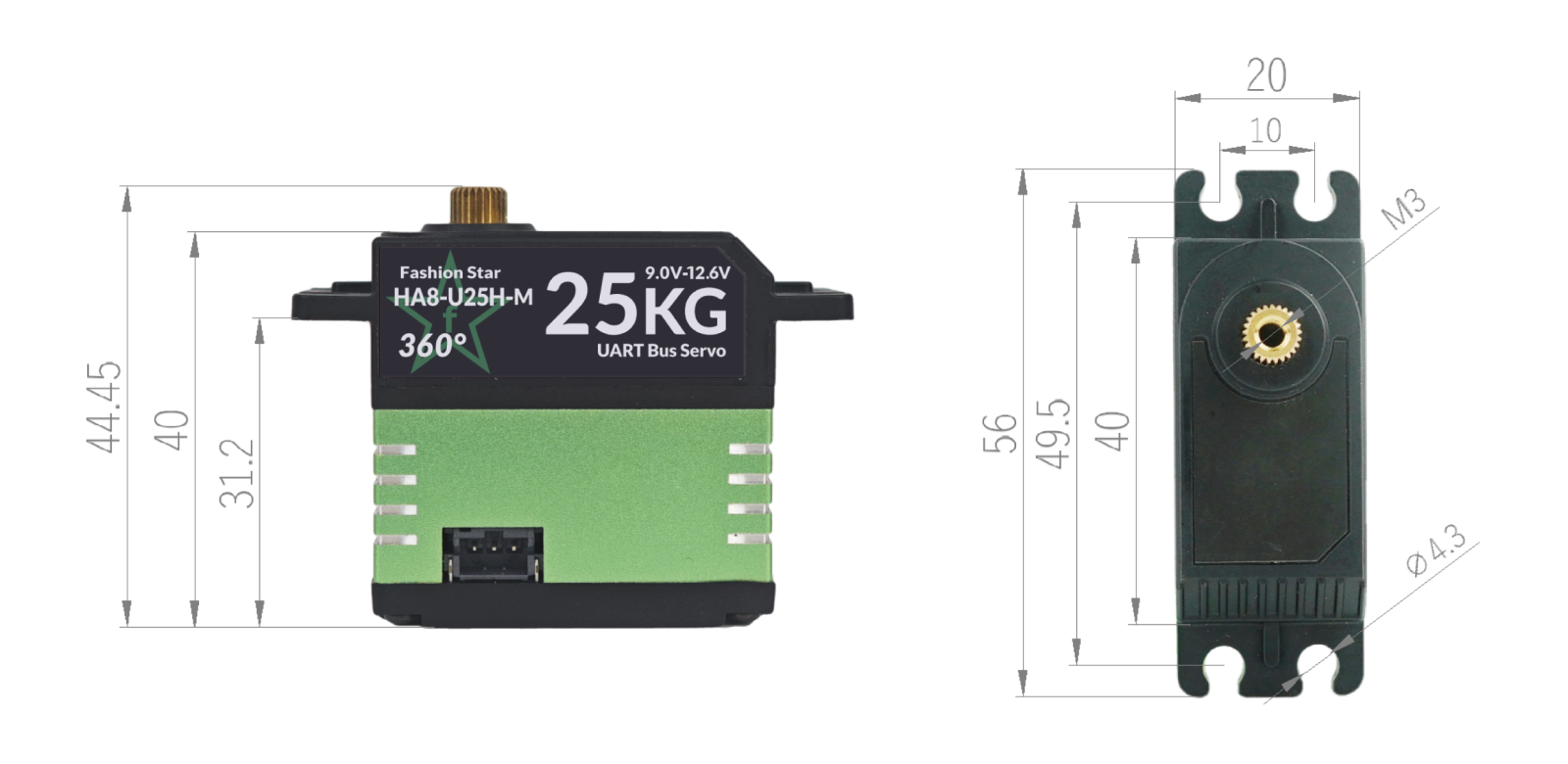
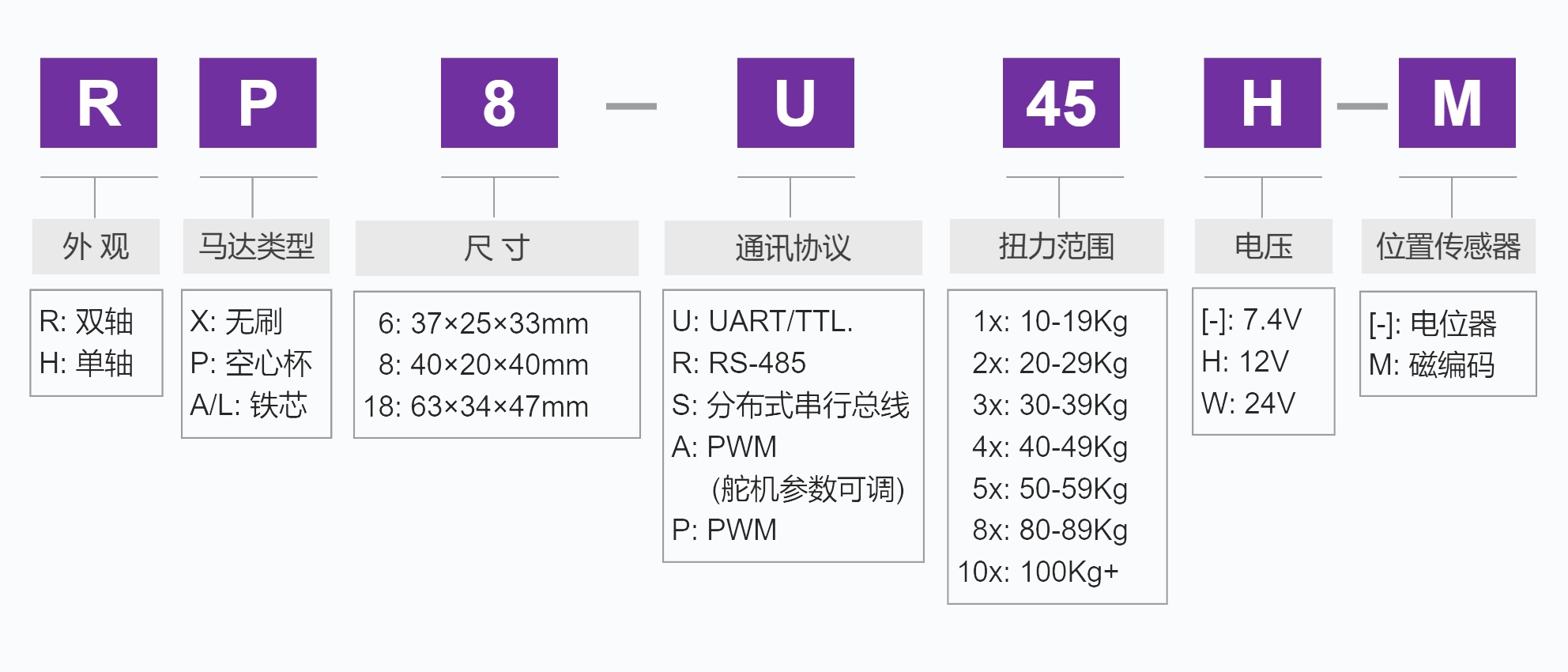
型号:RA8-U25H-M | HA8-U25H-M
总线伺服舵机集直流电机、减速箱、驱动控制、传感器和通讯协议于一体,可广泛应用于机器人、自动化、机械臂、医疗和科研教育等多个领域。
我们的产品通过UART协议支持灵活的双向通信,配备先进的加减速控制和全面保护机制,确保在各种环境下的顺畅与安全。外观尺寸兼容更高规格系列产品,便于升级。
主要参数
工作电压
马达类型
堵转扭矩
空载速度
位置传感器
9.0-12.6V
铁芯
25kg-cm (2.45N·m)
72.0rpm (0.150sec@60º)
12bit非接触式绝对值编码器 (磁编码)
外观尺寸

产品特点

单圈角度
控制角度时,可以同时设定旋转速度、间隔时间以及功率阈值,适用于旋转角度小于360°的应用。

多圈角度
在单圈角度的基础上,支持在±1024圈的范围内进行任意圈数+角度的控制,适合多圈或外接减速齿轮应用。

轮式模式
支持对旋转圈数、旋转时间和旋转方向的独立设定,适用于轮式机器人的应用。

阻尼模式
允许舵机在外部力的作用下调整到不同的角度位置,同时保持一定的阻尼效果,并可自定义阻尼系数。

加减速算法
通过设置启动和刹车阶段的加减速曲线,提供更平滑的运动轨迹控制。

开放PID修改
根据应用需求调整比例、积分和微分增益,实现更优化的控制性能和响应速度。

零点校准
配合结构装配的需要,无需拆装,在±6°范围内重新校准零点位置。

波特率自定义
波特率范围:9600-500kbps,可通过舵机参数调试软件自定义。
全面保护
总线伺服舵机提供全面的保护功能,用户可以通过调试软件自定义启用或关闭各项保护,或设定适当的参数值以实现最佳保护效果。详细设置方法,请参考《正确设置总线伺服舵机的保护参数》。




产品特点
单圈角度
控制角度时,可以同时设定旋转速度、间隔时间以及功率阈值,适用于旋转角度小于360°的应用。
多圈角度
在单圈角度的基础上,支持在±1024圈的范围内进行任意圈数+角度的控制,适合多圈或外接减速齿轮应用。
轮式模式
支持对旋转圈数、旋转时间和旋转方向的独立设定,适用于轮式机器人的应用。
阻尼模式
允许舵机在外部力的作用下调整到不同的角度位置,同时保持一定的阻尼效果,并可自定义阻尼系数。
加减速算法
通过设置启动和刹车阶段的加减速曲线,提供更平滑的运动轨迹控制。
开放PID修改
根据应用需求调整比例、积分和微分增益,实现更优化的控制性能和响应速度。
零点校准
配合结构装配的需要,无需拆装,在±6°范围内重新校准零点位置。
波特率自定义
波特率范围:9600-500kbps,可通过舵机参数调试软件自定义。
全面保护
总线伺服舵机提供全面的保护功能,用户可以通过调试软件自定义启用或关闭各项保护,或设定适当的参数值以实现最佳保护效果。详细设置方法,请参考《正确设置总线伺服舵机的保护参数》。
产品特点
单圈角度
控制角度时,可以同时设定旋转速度、间隔时间以及功率阈值,适用于旋转角度小于360°的应用。
多圈角度
在单圈角度的基础上,支持在±1024圈的范围内进行任意圈数+角度的控制,适合多圈或外接减速齿轮应用。
轮式模式
支持对旋转圈数、旋转时间和旋转方向的独立设定,适用于轮式机器人的应用。
阻尼模式
允许舵机在外部力的作用下调整到不同的角度位置,同时保持一定的阻尼效果,并可自定义阻尼系数。
加减速算法
通过设置启动和刹车阶段的加减速曲线,提供更平滑的运动轨迹控制。
开放PID修改
根据应用需求调整比例、积分和微分增益,实现更优化的控制性能和响应速度。
零点校准
配合结构装配的需要,无需拆装,在±6°范围内重新校准零点位置。
波特率自定义
波特率范围:9600-500kbps,可通过舵机参数调试软件自定义。
全面保护
总线伺服舵机提供全面的保护功能,用户可以通过调试软件自定义启用或关闭各项保护,或设定适当的参数值以实现最佳保护效果。详细设置方法,请参考《正确设置总线伺服舵机的保护参数》。
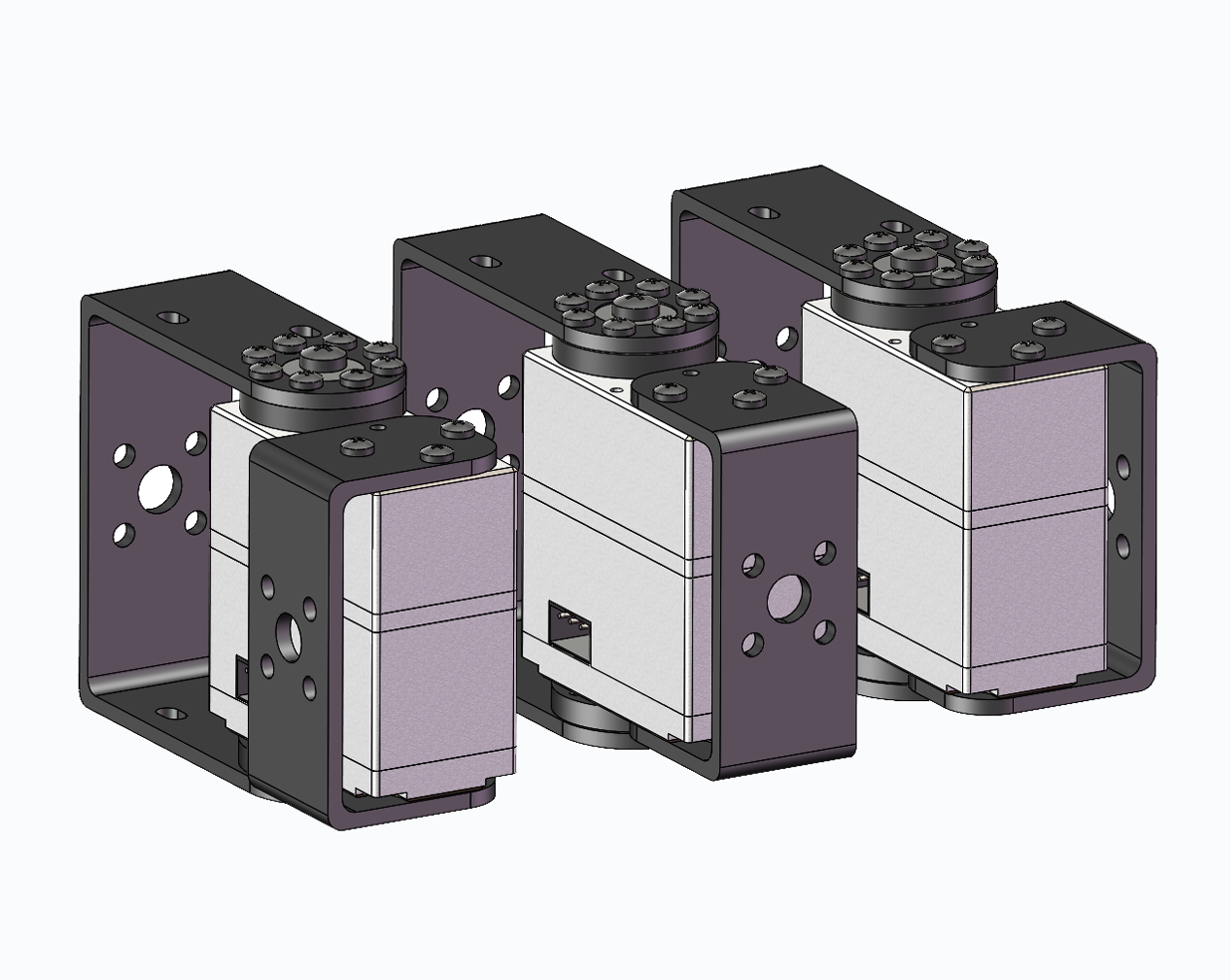
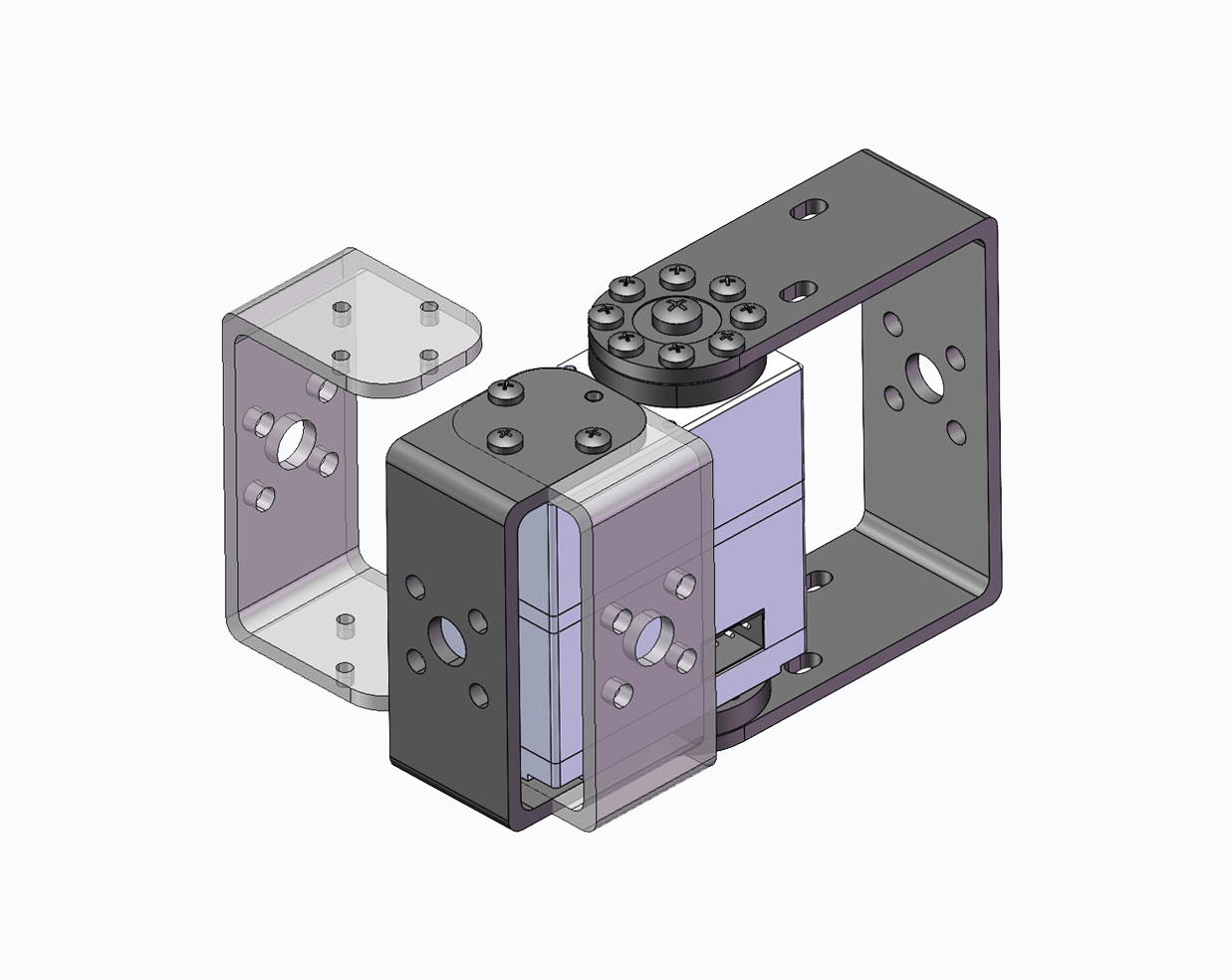
全对称安装孔位
双轴舵机预留有全对称的机身螺丝孔位,配套的U型支架能够从-90º、0º和90º三个角度安装,用户也可以灵活设计固定方式。极大地扩展了在云台、机械手臂和自动化等产品设计中的应用可能性和创造性。
舵机调试软件

配置与保护:设定舵机ID和波特率,自定义各项保护的阈值,确保舵机的稳定与安全运行。
数据监控:舵机状态的可视化反馈,为用户提供位置、电压、电流、功率和温度等数据。
模式测试:在线模拟各种控制模式,方便用户了解并掌握舵机的工作特性。
一键恢复:恢复舵机至出厂设置,使用户能够从基本配置开始进行个性化调整。
多平台SDK
我们提供的SDK兼容多个平台,使得开发者能在不同的操作环境以及各种嵌入式系统上,轻松实现应用开发和集成,从而提高开发效率,缩短项目周期。

全对称安装孔位
双轴舵机预留有全对称的机身螺丝孔位,配套的U型支架能够从-90º、0º和90º三个角度安装,用户也可以灵活设计固定方式。极大地扩展了在云台、机械手臂和自动化等产品设计中的应用可能性和创造性。
舵机调试软件
配置与保护:设定舵机ID和波特率,自定义各项保护的阈值,确保舵机的稳定与安全运行。
数据监控:舵机状态的可视化反馈,为用户提供位置、电压、电流、功率和温度等数据。
模式测试:在线模拟各种控制模式,方便用户了解并掌握舵机的工作特性。
一键恢复:恢复舵机至出厂设置,使用户能够从基本配置开始进行个性化调整。
多平台SDK
我们提供的SDK兼容多个平台,使得开发者能在不同的操作环境以及各种嵌入式系统上,轻松实现应用开发和集成,从而提高开发效率,缩短项目周期。
特性参数
| 工作电压 | 9.0-12.6V | |
| 电机类型 | 铁芯 | |
| 堵转扭矩 | 25kg-cm (2.45N·m) | |
| 空载速度 | 72.0rpm(0.150sec@60º ) | |
| 工作模式 | 单圈角度模式 多圈角度模式 轮式模式 阻尼模式 | |
| 保护模式 | 电压保护 堵转保护 功率保护 温度保护 | |
| 工作温度 | -10 ~ 60℃ | |
| 堵转电流 | 3A | |
| 空载电流 | 200mA | |
| 待机电流 | 20mA | |
| 位置传感器 | 12bit非接触式编码器 (磁编码) | |
| 有效角度 | 360° | |
| 分辨率 | 4096 [阶/360º] | |
| 处理器 | 32bit MCU | |
| 反馈信号 | 电压 | 电流 | 温度 | 角度 | 功率 | |
| 通讯协议 | UART/TTL | |
| 波特率 | 9600~500Kbps | |
| ID范围 | 0~254 | |
| 齿轮材料 | 全金属铜铝组合 | |
| 齿比 | 273:1 | |
| 输出齿 | 铜 / Ø6mm / 25T | |
| 外壳材料 | 铝合金中段/上下壳工程塑胶 | |
| 接口类型 | PH2.0 | |
| 外观 | 单轴 | 双轴 | |
| 尺寸 | 40×40×20mm | |
| 重量 | 63g |
*测试条件:电源供电12.0V,环境温度25℃。
订购型号
- RA8-U25H-M
- HA8-U25H-M
发布者:Fashion Star,转转请注明出处:https://fashionrobo.com/actuator-u25-12v/25906/
