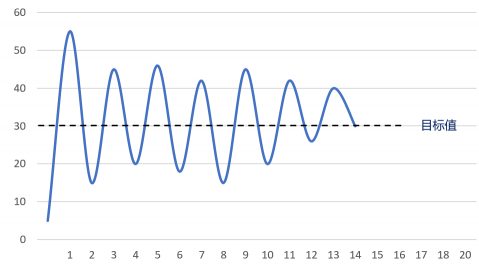
1. PID调节基本原理
PID说明
- Kp(比例增益):直接影响系统的响应速度和超调量。
- Ki(积分时间):用于消除稳态误差,但可能导致系统震荡。
- Kd(微分时间):提升系统稳定性,抑制超调,但对噪声敏感。
|
注意:此文以控制精度为目的,不同负载对应的PID会有所不同。对精度要求不高需要“丝滑”运行的采用出厂PID即可。 |
2. 舵机PID调节建议
2.1 比例参数P调节建议
首先将积分(KI、Hold KI)、微分系数(KD、Hold KD)置零,使系统为纯比例(KP、Hold KP)控制。接着逐渐增大比例系数,直至系统出现振荡;此时再逐渐减小比例系数,直至系统振荡消失,然后记录此时的比例系数,并设定系统的比例系数为当前值的 60%~70%。

2.2 积分参数I调节建议
积分系数(KI、Hold KI)一般不用设定,为 0 即可。如果PD环节无法优化到达精度再设定为1(会有震荡抖动)。
2.3 微分参数D调节建议
确定比例系数后,接着逐渐增大微分系数(KD、Hold KD),直至系统出现振荡;此时再逐渐减小微分系数,直至系统振荡消失,然后记录此时的微分系数,微分系数取系统不振荡时的30%左右。
3. 调节时注意事项
- 系统空载、带载联调,再对 PID 参数进行微调,直至满足要求。
- 在使用PID时,如果只使用一个参数是没有意义,至少使用两个参数,并且P(比例项)是必须要有的。虽然PID有三个参数,但大多数情况下PID三个参数并不是都使用上的,一般会其中两个来组合使用,比如PD组合用于追求稳定的系统,PI组合用于追求快速响应的系统。
- 当然PID用于即追求稳定又追求快速响应的系统,但是实际上PID参数越多越难调,而且许多情况下两个参数的效果已经足够了。
4. PID参考值(精度)
HA8-U25、RA8-U25 : kp1750 , ki1 , kd7005
HP8-U45-M、RP8-U45-M : kp800 , ki0 , kd5000
发布者:Fashion Star,转转请注明出处:https://fashionrobo.com/pid-modification/26303/
