
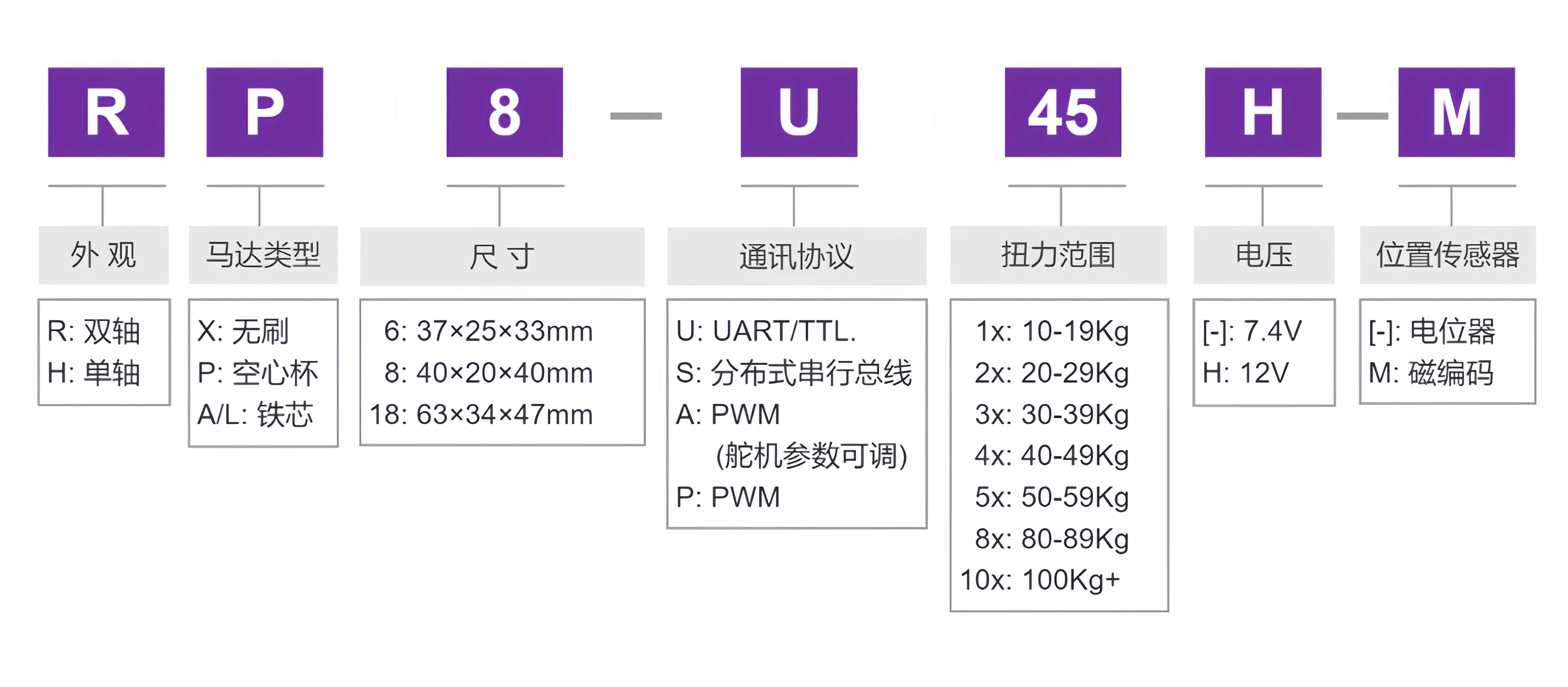
型号:RP8-S22 | HP8-S22
分布式串行总线平台 (简称DBSP) ,主要面向多关节的机器人产品,搭配位置回读的动作编辑器,让编程“零”基础的你,都可以轻松完成机器人的动作设计。
适用于多关节机器人、人形机器人、四足机器人、多足仿生机器人、入门机械手臂、STEAM教育等多个领域。
主要参数
工作电压
堵转扭矩
空载速度
堵转电流
6.0-8.4V
25Kg-cm (2.5N·m)
0.15sec@60º (72.0rpm)
3A
主要特点

32位处理器
32位Cortex M3处理器,最多可存储1000组动作。

分布式串行总线
6路独立总线通道,分布式排列,优化布线和电源分配管理。

多平台开发
兼容多平台二次开发,支持树莓派/Arduino UNO专用扩展板。

ID自动分配
系统自动扫描各个通道的舵机,并根据连线顺序依次分配ID。

位置回读式动作编程
掰动关节–扫描舵机–设置执行时间,3步即可完成动作设计。

Mixly图形化编程
在Mixly编程环境中,直接控制舵机或调用动作组。
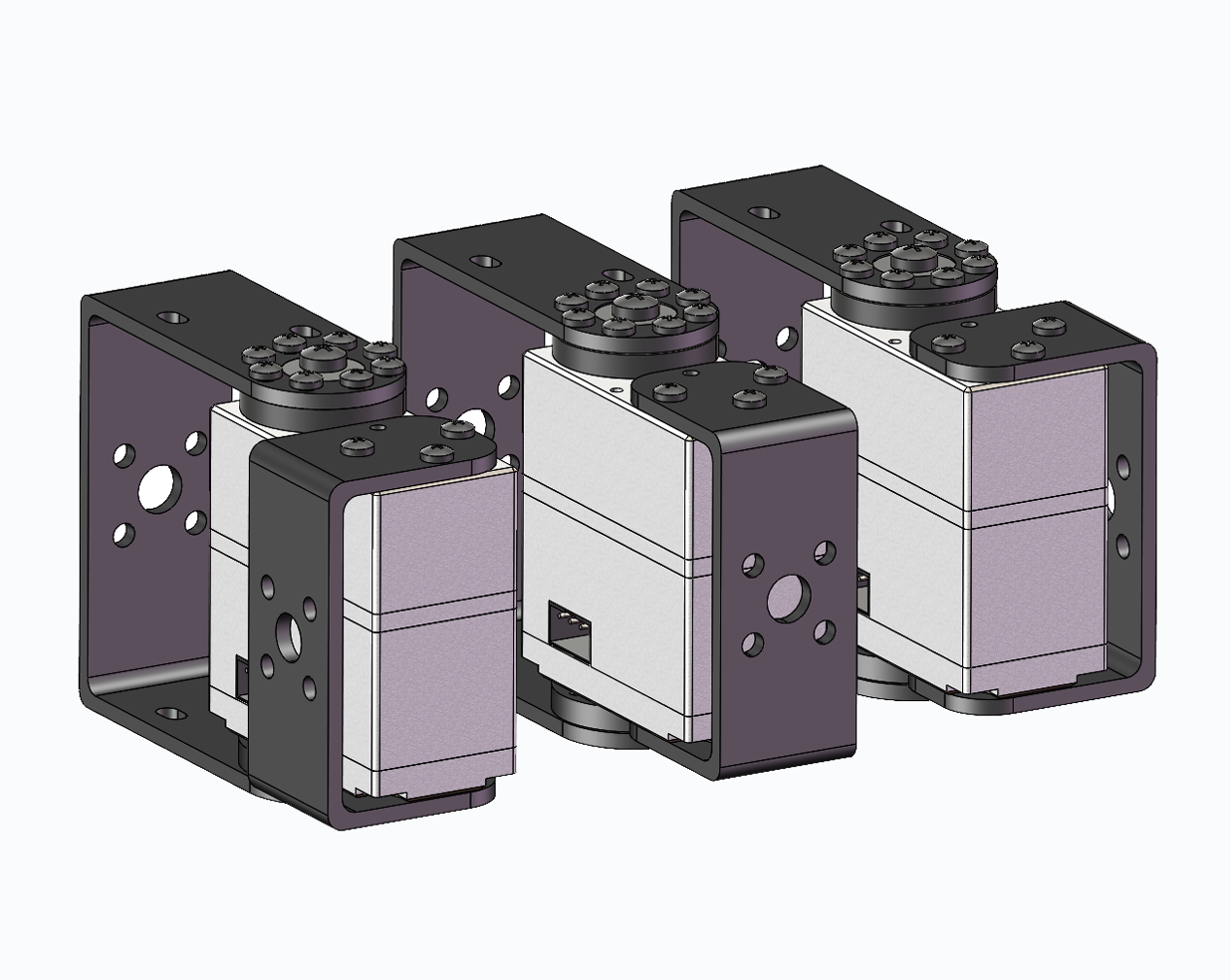
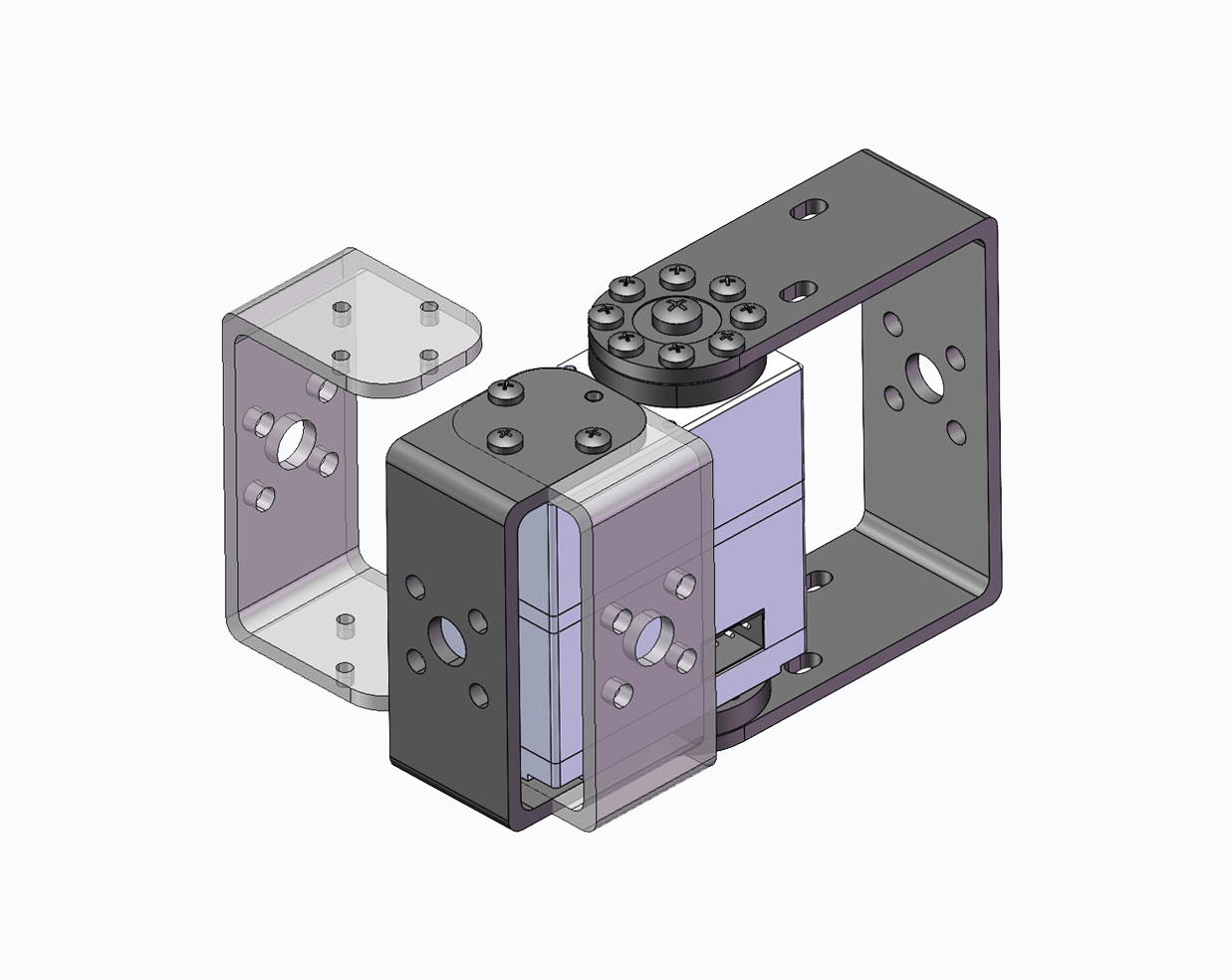
全对称安装孔位
双轴舵机预留有全对称的机身螺丝孔位,配套的U型支架能够从-90º、0º和90º三个角度安装,用户也可以灵活设计固定方式。极大地扩展了在云台、机械手臂和自动化等产品设计中的应用可能性和创造性。
可视化动作编辑器
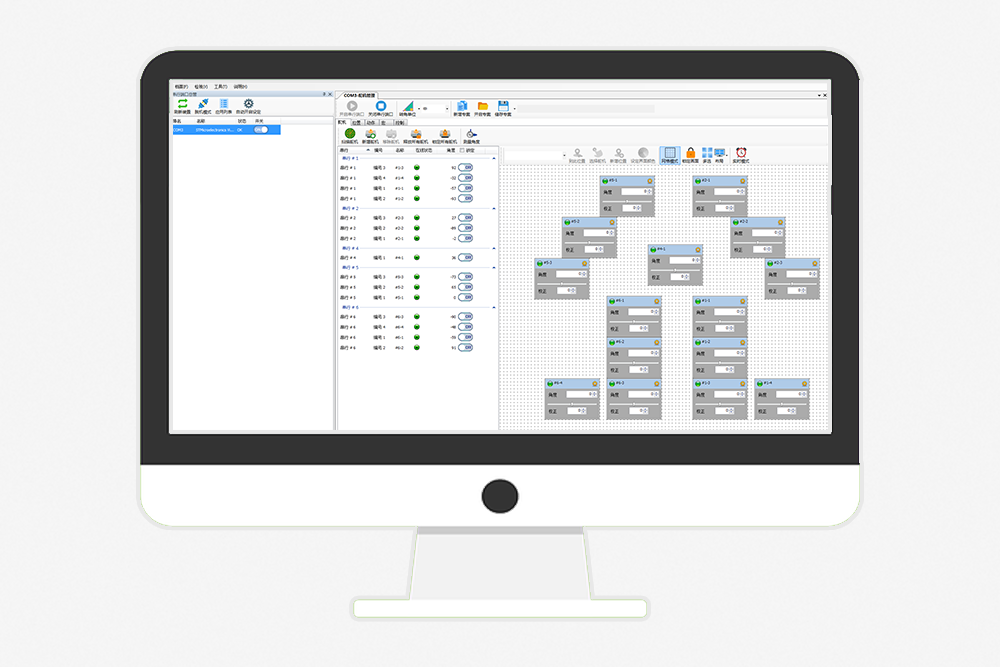
- 全局舵机扫描
- 在线动作编辑
- 动作组管理
- 动作延时、嵌套
- 遥控器按钮映射
特性参数
| 工作电压 | 6.0-8.4V | |
| 电机类型 | 铁芯 | |
| 堵转扭矩1 | 25Kg-cm (2.5N·m) | |
| 空载速度1 | 0.15sec@60º (72.0rpm) | |
| 工作温度 | -10 ~ 60℃ | |
| 堵转电流 | 3A | |
| 空载电流 | 200mA | |
| 待机电流 | 20mA | |
| 有效角度 | 180° | |
| 齿轮材料 | 全金属铜铝组合 | |
| 齿比 | 273:1 | |
| 输出齿 | 铜 / Ø6mm / 25T | |
| 外壳材料 | 铝合金中段/上下壳工程塑胶 | |
| 接口类型 | PH2.0 | |
| 外观 | 单轴 | 双轴 | |
| 尺寸 | 40×40×20mm | |
| 重量2 | 63g |
订购型号
- RP8-S22
- HP8-S22
- 此数据是在输入电压为7.4V,室温25℃的环境下测量取得;
- 重量依配置和制造工艺的不同而可能有所差异。
发布者:Fashion Star,转转请注明出处:https://fashionrobo.com/actuator-dbsp25/22953/
